Chi si dedica alla fotografia astronomica, sia i più esperti che chi è agli inizi, deve fare i conti con l’autoguida e con la necessità di collegare la camera di guida a un computer che gestisca questa importantissima fase. Un notebook è obbligatorio per chi usa una camera CCD per fare riprese, mentre chi impiega le reflex ha a disposizione una soluzione chiamata autoguida standalone che permette, previa molta pazienza e/o denaro, di non utilizzare il computer.
Qualsiasi sia la vostra situazione, a meno di non disporre di un osservatorio privato (magari), usare un computer durante le sessioni di fotografia astronomica ha molti inconvenienti, tra cui:
- Dover trasportare un pesante e ingombrante notebook con noi e sistemarlo in un luogo sicuro, che nel buio della notte e nelle impervie situazioni in cui piazziamo i telescopi (erba alta, alberi, terreno scosceso…) non è proprio semplice;
- L’alto consumo di corrente, che supera spesso i 3-4 ampere e costringe a essere dipendenti dalla corrente elettrica o a viaggiare con ingombranti e pesanti batterie da auto per non rimanere a secco durante la notte.
- Inoltre i notebook di solito hanno un’alimentazione superiore a 12V, il che rende necessario collegare un inverter ad una batteria (= altro esborso economico)
Fino a qualche anno fa non c’erano molte alternative: o un notebook, magari piccolino, o un’autoguida standalone che spesso, però, rappresenta quasi un terno al lotto perché è sicuramente più difficile da gestire rispetto a quanto possano fare software come MaxIm DL o PHD.
Oltre un anno fa, PrimaLuceLab ha introdotto sul mercato Eagle, un sistema che racchiude all’interno di un unico case modulare, un bridge di alimentazione, un vero e proprio computer desktop con Windows 10 Enterprise modificato e ottimizzato per Eagle e quindi per l’uso astronomico e la possibilità di installarlo in diversi punti tra montatura e telescopio grazie al sistema Plus. Eagle non è solamente un “contenitore”, ma al suo interno contiene una suite di diversi software oltre al fatto che possiamo installare tutti i programmi che vogliamo, inoltre potendo essere montato in modo solidale con il nostro strumento, possiamo staccare tutto insieme, riporre e…in 2 minuti abbiamo smontato e rimontato! Ovviamente come in tutte le cose ci sono i pro ed i contro, andiamo ad analizzarli.
Se Eagle rappresenta, al momento attuale, la più avanzata soluzione dedicata per l’astrofotografo itinerante, è anche vero che il costo non è detto che sia alla portata di tutti vista la mole di caratteristiche avanzate implementate. La domanda posta è: si riesce ad alleggerire lo stesso il setup, perdendo ovviamente di funzionalità complessive, ma ad un minor prezzo?
Ora ci sono i Windows Tablet, dei tablet che montano una versione ottimizzata (=depotenziata) di Windows, ma che sono pratici quanto un normale tablet Android o iOS. Una soluzione del genere permette di avere una versatilità simile a quella di un di un pc, sul quale possiamo installare i nostri programmi per la gestione della ripresa e della guida, con la comodità di un tablet, compreso un consumo nettamente ridotto rispetto ai notebook. Di fatto possiamo trasformare, almeno la fase di autoguida, come se fosse fatta con una camera standalone, solo che avremo la potenza di un software installato come PHD, l’economicità di una camera usb con porta ST4 e la comodità di uno schermo LCD da almeno 7 pollici, senza gli ingombri e i problemi tipici di un computer, anche se dobbiamo vedere dove sistemare il tablet dato che non prevede sei sistemi di montaggio nativi sul nostro telescopio.
Ma se invece vogliamo tenerci il nostro PC/Tablet e abbiamo solo l’esigenza di ottimizzare il più possibile il setup (cavi, hub usb, bridge di alimentazione..), abbiamo una reale alternativa senza doverci autocostruire qualcosa noi? Per fortuna si, ci ha pensato Geoptik con il Various power supply, che è un bridge di alimentazione avanzato con un hub usb integrato. Offre 4 prese USB 2.0, 1 uscita da 5A (jack 2.1×5.5), 2 uscite jack da 2A (2.1×5.5), 2 uscite per fasce anticondensa kendrik compatibili, 2 prese accendisigari, 1 uscita con regolazione del voltaggio (ideale per alimentare le reflex usando una falsa batteria) e di serie viene fornito con un cavo di alimentazione che si collega direttamene ad una batteria da auto, dato che il Varius alimenta tutto, dalla montatura alle camere CCD. Il various si può installare sul telescopio (non in modo solidale come Eagle, ma comunque ha una basetta per rimuoverlo facilmente) e tutti i device sono connessi a lui. Quindi esce un cavo usb che andrà al nostro PC/Tablet.
Per scrivere questo post mi sono indirizzato sul tablet più economico che si possa trovare in giro: si chiama Mediacom WinPad W700, un oggetto con schermo da 7 pollici, dotato di Windows 10 e dal prezzo di circa 40 euro (sì, 40 euro!). Dopo averlo provato per più di un mese posso dare qualche consiglio per farlo funzionare al meglio e per gestire, proprio come se fosse un normale pc, le fasi di guida e persino di acquisizione delle immagini, sebbene con qualche limite.
Il tablet ha un processore quadcore da 1,33 GHz, un GB di RAM e solo 16 GB di spazio disco, che può essere aumentato grazie allo slot per una microSD. Il punto debole di questa soluzione è la presenza di una sola porta micro-usb, quella che in pratica si usa per ricaricarlo. Come facciamo allora per farlo funzionare? E un GB di RAM basta per la nostra sessione di riprese?
Le risposte sono affermative, a patto di comprare qualche altro economico accessorio e di ottimizzare un poco il sistema operativo.

Il tablet Windows Winpad W700: la soluzione più economica per gestire le nostre sessioni di fotografia astronomica
Ottimizzazione del sistema operativo
Windows 10, al contrario degli immediati predecessori, è un sistema leggero e stabile, che non ha problemi anche con driver vecchi (ci ho fatto girare camere SBIG del 2005). Il GB di RAM di cui è dotato il tablet è più che sufficiente se si disattivano servizi inutili come l’assistente vocale Cortana e si eliminano le (poche) animazioni grafiche. In questo modo il sistema operativo usa solo mezzo GB di RAM; il restante è tutto per noi e vista la leggerezza dei programmi di guida e di acquisizione è una quantità più che sufficiente. A meno che non si abbiano dei problemi di instabilità nativa che però non ho riscontrato sui due esemplari che ho testato, ci sono tre operazioni importanti da fare per rendere Windows ancora più veloce e stabile:
- Disattivare l’avvio rapido del sistema operativo, che è attivato di default e che a volte può causare il riavvio improvviso del tablet poco dopo che è stato acceso (nelle opzioni di risparmio energia, alla voce Scegliere cosa fanno i pulsanti di accensione, si clicca su Modifica le impostazioni attualmente non disponibili e su Impostazioni di arresto deselezionare Avvio Rapido);
- Se si utilizza solo per le sessioni fotografiche, il consiglio è di tenerlo scollegato dalla rete internet e in questo modo NON fargli mai scaricare gli aggiornamenti di Windows, che tendono a essere pesanti e a riempire il poco spazio disponibile. Questo non toglie che sul campo potremo collegarlo via wireless a una rete locale e così controllare con il nostro smartphone da dentro la macchina o dentro casa come sta andando la sessione di ripresa (su questo tornerò alla fine del post);
- Disattivare la sospensione automatica dopo qualche minuto e attivare solo lo spegnimento dello schermo. In questo modo eviteremo la possibile sospensione dell’attività durante le sessioni di fotografia e allo stesso tempo faremo spegnere lo schermo al tablet quando tutto andrà bene durante la serata e non ci sarà bisogno di toccarlo;
- Attivare la modalità Desktop di default (Impostazioni à Sistema à Modalità tablet e alla voce All’accesso impostare Vai al desktop). Windows può essere usato anche in modalità tablet ma questa soluzione per i nostri scopi è molto scomoda; meglio usare il classico ambiente che abbiamo a disposizione su ogni computer.
A confronto:
- Eagle: è un sistema completo e modulare, che si monta direttamente sul nostro telescopio, ottimizzando trasportabilità, funzionalità e possibilità di automazione
- Tablet: può gestire solamente ed in modo “basilare” le funzionalità di acquisizione e autoguida, inoltre non si può montare sul nostro telescopio in modo solidale.
- Varius: essendo un bridge avanzato di alimentazione con hub usb integrato, esce solo un cavo verso il nostro PC/Tablet (il Tablet può essere anche quello proposto, per dire). Il Varius ha una basetta per poterlo installare sul nostro strumento, ma poi va rimosso, non essendo solidale come Eagle.
L’ alimentazione
La batteria del tablet dura poco, circa 3 ore se si utilizza in modo normale e per di più non ci sono porte usb per collegare la nostra strumentazione. Come facciamo? C’è una soluzione rapida, leggera ed economica.
Per l’alimentazione possiamo comprare un economico power bank. Il tablet in autoguida e con schermo spento consuma circa 0,7 Ampere. Un power bank da 5 Volt (il tablet va a 5 Volt) e 13-15 Ampere costa una ventina di euro (https://www.amazon.it/EasyAcc-Brilliant-Caricatore-15000%C2%A0mAh-Smartphone/dp/B00M8UFTQA/ref=sr_1_2?s=electronics&ie=UTF8&qid=1474975624&sr=1-2&keywords=power+bank+15000) e consente di avere l’alimentazione per circa 18 ore, a cui aggiungere le tre ore della batteria del tablet, per un totale di almeno 20 ore, a essere piuttosto conservativi: in pratica ci possiamo fare tranquillamente due notti senza ricaricarlo. Ovviamente questo calcolo si applica solamente alla batteria del tablet, se ci colleghiamo altri device (montatura, etc) la durata si ridurrà.
A confronto:
- Eagle: avendo un bridge di alimentazione integrato, alimenta dalla montatura alla camera ccd raffreddata, basta collegarlo ad una fonte di alimentazione adeguata. Tutti i cavi di alimentazione dei nostri device partono da Eagle. Può fornire una potenza di alimentazione di 3A e 5A a seconda della porta utilizzata.
- Tablet: non prevede nativamente di alimentare il nostro setup, quindi dobbiamo prevedere di creare un sistema per alimentare i device che però non richiedono un’assorbimento di oltre 500mAh, dato che saranno collegati all’hub usb esterno, mentre se richiedono alimentazione superiore (camere ccd raffreddate, montatura, etc) dovremo prevedere di aggiungere un altro sistema di alimentazione.
- Varius: basta collegare il cavo fornito ad una batteria da auto con un Amperaggio adeguato (consiglio minimo 50Ah per una nottata fredda di astrofotografia) e collegare tutti i device al Varius, che li alimenterà oltre a collegarli al nostro PC/Tablet.
Porte USB e collegamenti
Come facciamo invece per le porte usb? E magari tenere il tablet collegato al power bank contemporaneamente? C’è un piccolo trucco. Dobbiamo comprare, per pochi euro un cavo OTG a Y, come questo: https://www.amazon.it/gp/product/B00M1H5348/ref=oh_aui_detailpage_o01_s00?ie=UTF8&psc=1 (io ho esattamente questo modello).
Agganciato alla presa micro usb del tablet, permette di collegare delle periferiche e di alimentare sia queste che il tablet. Il cavo funziona solo se alimentato da una fonte esterna: dal tablet non esce corrente come nei normali cavi OTG (ma vi può entrare). La fonte esterna sarà il nostro power bank. All’unica porta USB di questo cavo possiamo collegare un piccolo hub a 4 o 6 porte e il gioco è fatto. L’hub riceve infatti l’alimentazione dal power bank, che alimenterà tutte le periferiche che ci collegheremo, compresa una camera di guida e potremo quindi usare la nostra configurazione come se fosse un normale computer. Il consiglio è quello di acquistare anche mouse e tastiera wireless: per circa 20 euro avremo un piccolo ricevitore da collegare a una delle porte USB, che ci permetterà di usare mouse e tastiera al posto del touch, che è pure piuttosto impreciso (per 40 euro non si può pretendere di più). L’uso di mouse e tastiera wireless, oltre a eliminare due cavi, consente di occupare solo una delle porte usb del nostro hub e quindi di avere a disposizione una maggiore potenza di fuoco per collegarci quello che vogliamo.
A questo punto il nostro setup è pronto: il tablet funziona esattamente come un normale computer, quindi non c’è molto altro da aggiungere. Possiamo collegare le periferiche che vogliamo e installare driver e programmi, scaricandoli da internet o, meglio, importandoli da una chiavetta USB (così teniamo il tablet sempre scollegato dalla rete per impedire installazione di aggiornamenti e/o rallentamenti vari: non vorremo mica che si blocchi installando degli aggiornamenti durante la serata con il cielo migliore della nostra vita, vero!?). Tenete conto che se collegate device che richiedono ulteriore alimentazione rispetto a quella fornita dalle porte USB, dovrete collegarci una fonte di alimentazione supplementare.

Ecco la configurazione con porte USB e alimentata da un power bank da 26 Ampere pronta per la serata di fotografia astronomica. Autonomia stimata: 40 ore
Risultati
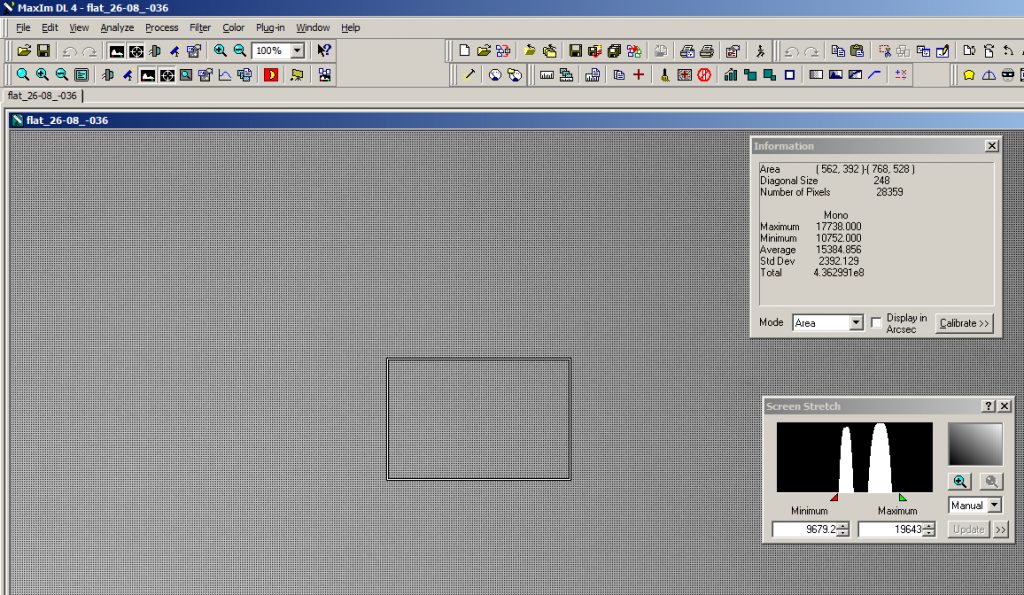
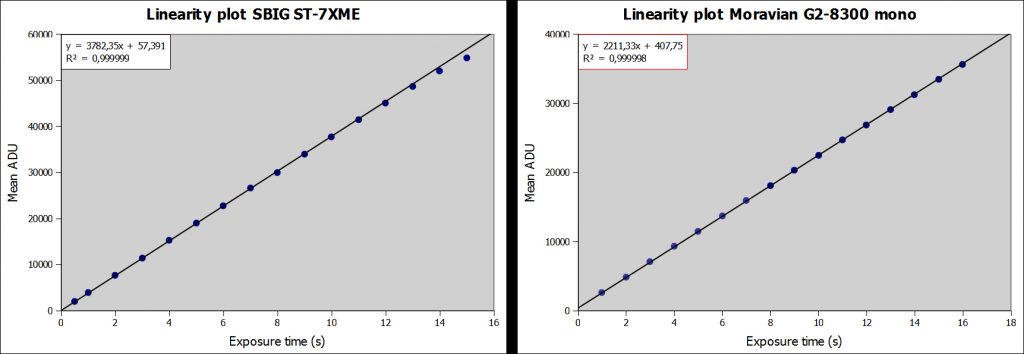
Ho provato il WinPad W700 con diverse configurazioni e sottoponendolo anche a qualche stress. Ho installato senza problemi i driver delle camere CCD che utilizzo, una ST-7XME e un ST-2000XCM della SBIG e quelli di una camera planetaria che ho utilizzato come autoguida attraverso PHD. Ho fatto girare la versione 5 di MaxIm DL, che gestisce sia la fase di ripresa che di autoguida, senza particolari problemi, oltre a PHD. Anche i driver ascom funzionano, così come programmi quali Cartes du Ciel. Non ho provato Stellarium perché è troppo pesante e in generale non consiglio di installarci software per il fotoritocco come Photoshop e PixInsight: questo tablet infatti va bene solo per gestire l’autoguida e al limite la fase di ripresa, mentre Eagle permette di eseguire qualsiasi tipo di operazione, essendo un computer vero e proprio.
Non ho provato a utilizzarlo per l’imaging planetario ma posso affermare senza problemi che NON è indicato, sia per la poca RAM che per l’esiguo spazio di archiviazione. In ogni caso consiglio di acquistare una micro SD da 32GB, che si trova a una decina di euro, per avere così spazio a sufficienza per accumulare molti dati durante le serate di ripresa del profondo cielo.

Uno screenshot direttamente dal Winpad W700 di MaxIm DL durante l’acquisizione e la guida sul finire di una serata di fotografica.
In commercio ci sono tablet più performanti, naturalmente, ma ho voluto testare la soluzione più economica per capire quali fossero le sue potenzialità. Per chi usa una reflex digitale rappresenta un’alternativa molto economica e migliore rispetto alle camere autoguida standalone (che devono essere alimentate comunque!) e gestire quindi la sola fase di guida. In generale anche per gli astrofotografi itineranti che desiderano togliere peso e cavi dalla loro macchina è una valida alternativa per gestire anche la fase di acquisizione. Ovviamente dovremo vedere dove e come appendere i vari cavi, power bank, tablet, dove posizionare la tastiera, etc.
A confronto:
- Eagle: ovviamente è molto più performante di un economico tablet e consente di svolgere tutte le operazioni desiderate, oltre a fornire la flessibilità di utilizzo grazie al bridge di alimentazione integrato. Non ha problemi per eseguire qualsiasi software, così come per elaborare e acquisire filmati planetari con camere dotate anche di porta USB 3.0.
- Tablet: ideale se abbiamo un setup molto leggero anche in termini di assorbimento della corrente, infatti le ccd raffreddate andrebbero comunque alimentate a parte, così come anche la montatura va alimentata a parte. In sostanza dovremo prevedere di alimentare ogni device in modo autonomo tranne quelli puramente USB. Questo porta a preferire il tablet se si riprende con una reflex non raffreddata, gestendo solamente l’autoguida e al massimo le riprese tramite un programma di terze parti.
- Varius: può gestire tranquillamente, come alimentazione, montatura, camere raffreddate, fasce anticondensa. E’ stato pensato per le sessioni deepsky, mentre l’uso con camere planetarie sarà limitato dalla presenza di un hub usb 2.0 e dalla lunghezza del cavo derivante, oltre al limite fisico del la nostra macchina di ripresa. I software da eseguire dipendono dalla potenza del nostro PC/Tablet
Bonus: controllare il tablet in remoto
Queste poche righe in realtà sono generiche e consentono di visualizzare il desktop del computer/tablet che sta facendo le riprese da qualsiasi dispositivo, anche uno smartphone. Ci sono diversi metodi, ma il mio preferito è il seguente. Quello che serve è una rete locale che può essere creata con un piccolo router wifi da collegare a una presa USB (non serve internet!) e il programma VNC. Sul computer/tablet si installerà il software gratuito chiamato tight VNC, mentre sullo smartphone un’applicazione gratuita chiamata VNC Viewer. Si collegano entrambi i dispositivi alla rete locale, sul computer che controlla la sessione di ripresa si avvia Tight VNC e ci si annota l’indirizzo IP che gli è stato assegnato (Nella finestra di ricerca digitare cmd e premere invio; poi dal prompt dei comandi che si apre digitare Ipconfig, premere invio e leggere la voce IPv4 Adress); questo indirizzo deve essere immesso nell’applicazione VNC Viewer quando si deve configurare il computer a cui vorremmo connetterci. Il WinPad W700 si controlla in remoto che è un piacere e non ha mai mostrato rallentamenti.
A confronto:
- Eagle: genera di automatico una rete WiFi e basterà connettersi con il device che vogliamo usare per controllarlo. Il tempo di latenza è inferiore rispetto al VNC, perchè usa un sistema differente.
- Tablet: dobbiamo creare noi la nostra rete VNC, operazione consigliata a chi ha almeno un po’ di esperienza informatica. Sicuramente per i meno esperti si può usare TeamViewer come alternativa al VNC.
- Varius: stesso discorso del Tablet, possiamo scegliere se affidarci ad un cavo sub 2.0 con lunghezza max 3mt circa, oppure creare anche qui una rete per il controllo in remoto.
Il Tablet è il Sacro Graal per la fotografia astronomica? Non proprio
La soluzione proposta qui comporta una spesa minima ma ha naturalmente delle limitazioni. Il tablet ha una risoluzione dello schermo di soli 1024X600 pixel e con appena 7 pollici di diagonale richiede una buona vista. L’hardware funziona e sembra stabile, ma nulla si sa sulla sua durata nel tempo. Il touch screen su uno schermo così piccolo non è comodo da usare, tanto che è indispensabile una tastiera e un mouse esterni. I collegamenti sono affidabili ma richiedono un minimo di manualità ed è necessario seguire le indicazioni per l’assemblaggio e l’ottimizzazione del setup proposte nel post. Insomma, si tratta di una soluzione che funziona certamente ma che non si può sostituire a oggetti di maggiore potenza, eleganza e affidabilità, come il sistema Eagle di PrimaLuceLab, che è molto più potente, versatile e pronto all’uso e ha materiali di ben altra fattura rispetto alla plastica e allo schermo minuscono di un tablet economico. La soluzione di Eagle, per chi fa della fotografia itinerante il suo stile di vita, possiede camere CCD con grossi sensori e magari vuole controllare focheggiatori elettrici, plate solving e in generale una complessa sessione di fotografia astronomica è sicuramente da preferire a un tablet dalla limitata potenza di calcolo e di memoria che non ce la farebbe proprio se si carica oltre la gestione della guida e della semplice acquisizione delle immagini.
E’ anche vero che il Varius della Geoptik è una buona soluzione per avere tutti i nostri device alimentati, collegati e con solo 1 cavo che va verso il nostro PC/Tablet.
D’altra parte si tratta di due soluzioni molto diverse; sarebbe come confrontare una vecchia reflex Canon 350D che si trova usata a meno di 200 euro con una nuovissima full frame Canon 7D Mark II: entrambe sono in grado di produrre dei risultati, ma la 7D possiede una potenza inarrivabile per la vetusta 350D e con la seria possibilità che questa potrà durare per ben più a lungo della configurazione più economica. Il Varius si colloca a metà tra i 2, come prezzo, funzionalità e possibilità.
A confronto:
- Eagle: in un unico oggetto racchiude un vero e proprio pc, un bridge di alimentazione per tutti i nostri device e la possibilità di montarlo sul nostro setup, senza poi smontarlo ad ogni utilizzo. E’ in grado di fare tutto, dal deepsky alle riprese planetarie, specie nella versione Observatory. Inoltre è tutto integrato a livello software.
- Tablet: ha dalla sua l’economicità e la compattezza, ideale per operazioni di base come autoguida e gestire l’acquisizione, ma per alimentare i nostri device (tranne quelli USB) dobbiamo pensare ad altre fonti di alimentazione. Va bene per gestire sessioni “semplici” sul deepsky, mentre per le riprese planetarie il framerate della camera si abbasserà moltissimo per via dell’hardware economico.
- Varius: essendo solamente un bridge di alimentazione con hub usb 2.0 integrato, richiede sempre e comunque di essere collegato al nostro PC/Tablet. Offre molte possibilità di alimentazione, in pratica può alimentare qualsiasi cosa vogliamo connetterci. Rispetto al tablet, se ci colleghiamo un PC performante, possiamo eseguire tutte le operazioni che vogliamo, con limitazioni per l’uso con camere planetarie in fase di acquisizione. Si può montare e rimuovere dal nostro setup con la basetta fornita di serie.